Next: 9.2 Lie Algebra Up: 9 SE(3) Previous: 9 SE(3)
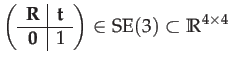
![]() is the group of rigid transformations in 3D space,
the semi-direct product
is the group of rigid transformations in 3D space,
the semi-direct product
![]() . It
has six degrees of freedom: three for translation and three for rotation.
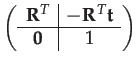
Subgroups include
. It
has six degrees of freedom: three for translation and three for rotation.
Subgroups include
![]() and
and
![]() .
.
| (111) | |||
| (112) | |||
 |
(113) | ||
 |
(114) |