Next: 8.4 Adjoint Representation Up: 8 SO(3) Previous: 8.2 Lie Algebra
The exponential map from
![]() to
to
![]() has a closed form (also called the Rodrigues formula). The tangent
vector
has a closed form (also called the Rodrigues formula). The tangent
vector
![]() can be interpreted as an axis-angle
representation of rotation: its exponential is the rotation around
the axis
can be interpreted as an axis-angle
representation of rotation: its exponential is the rotation around
the axis
![]() by
by
![]() radians:
radians:
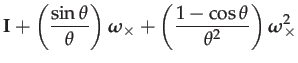
The higher-order terms in Eq. 102 collapse because
![]() .
The coefficients of
.
The coefficients of
![]() should be calculated with
Taylor series when
should be calculated with
Taylor series when ![]() is small.
is small.
Given a rotation matrix
![]() , the logarithm
can be computed by first determining
, the logarithm
can be computed by first determining
![]() ,
and then computing
,
and then computing
![]() from symmetric differences
(see the second term of Eq. 103).
from symmetric differences
(see the second term of Eq. 103).
Ethan Eade 2012-02-16